Summary
During automated production of solar cells, compact two-finger robot edge-grippers transport trays of silicon wafers between operations. To avoid impacts on the wafers surfaces, process engineers require reliable confirmation that gripper jaws are fully open before the gripper descends to pick up a tray. Ultraminiature inductive proximity sensors, mounted directly above the top faces of the gripper fingers, sense the position of the jaws in the fully open position, eliminating avoidable scrap costs.
Customer Values
- Embedded miniature distance sensors ensure reliable detection of potential obstructions, eliminating collision hazards
- Compact 3mm-diameter × 22mm V2A stainless-steel housing allows easy integration in tight spaces
- Sensing distance of 1mm offers designers attractive alternatives when specifying equipment
- Industry-standard PNP and NPN outputs with normally open or normally closed options interface easily with a wide range of control systems
- Proven technology ensures highly reliable fit-and-forget operation with no manual intervention
- Non-contact solution maintains production throughput and eliminates avoidable scrap costs
Specific Product Benefits
- Miniature stainless-steel inductive proximity sensors suitable for easy integration
- PNP and NPN interface with NO and NC options and minimal power consumption
- Sensor weight only 25 grams with a compact 3mm-diameter × 22mm housing
- Industry-standard −25°C to +70°C operating range
- Reliable, compact vibration-resistant sensors
Customer Application
Eliminating avoidable scrap costs has to be at the top of any production engineer’s to-do list, particularly when rectifying component damage also means interrupting a fast-moving automated production line. When the component in question is a costly photovoltaic silicon wafer, designers often turn to robotic handling systems, although relying on robots to achieve perfect alignment isn’t always the answer.
In a manufacturing cell, robotic handling systems assemble solar cells before presenting them for automated testing. To start, trays of silicon wafers are transported between operations by two-finger robot edge-grippers. If gripper malfunctions occur, scrap costs can mount rapidly, with mechanical damage caused by impacts on the wafer surfaces being a common cause.
Analysis showed that open/close errors account for a significant proportion of gripper malfunctions. Software routines alone can’t identify the position of the gripper fingers; attempts to pick up a wafer tray with the jaws only partially open result in fingers impacting on the wafer surfaces. A cost-effective hardware solution is required to provide overriding inhibition of picking routines if this situation arises.
Customer Solution
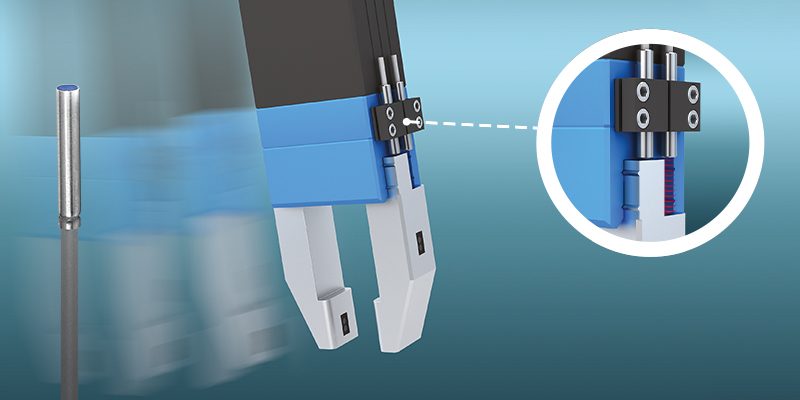
Designers specified two-finger grippers fitted with Contrinex Ultraminiature inductive sensors as a reliable and cost-effective means of detecting the position of the jaws at the extremes of travel. Before the gripper descends to pick up a tray, these miniature proximity sensors, mounted directly above the top faces of the gripper fingers, sense the position of the jaws in the fully open position.
Ultraminiature inductive sensors are designed with the needs of OEMs and system integrators in mind and provide an unobtrusive fit-and-forget solution. These miniature devices weigh only 25 grams, and with a compact 3mm-diameter x 22mm V2A stainless-steel housing, they allow easy integration in tight spaces with insufficient room for traditional devices.
With a sensing distance of 1mm, MiniDist devices offer designers attractive alternatives when specifying equipment. Industry-standard PNP and NPN outputs with normally open or normally closed options ensure optimum flexibility when interfacing with a wide range of control systems. Connection is via a PUR-sheathed cable with a 3-pin connector or 2-meter flying lead; alternative lengths are available.
These highly versatile miniature sensors meet designers’ needs for reliable operation while preventing accidental damage. The solution is both highly reliable and cost-effective while eliminating avoidable scrap costs; payback is rapid, while production throughput is maintained at target levels without increasing the cost of quality.