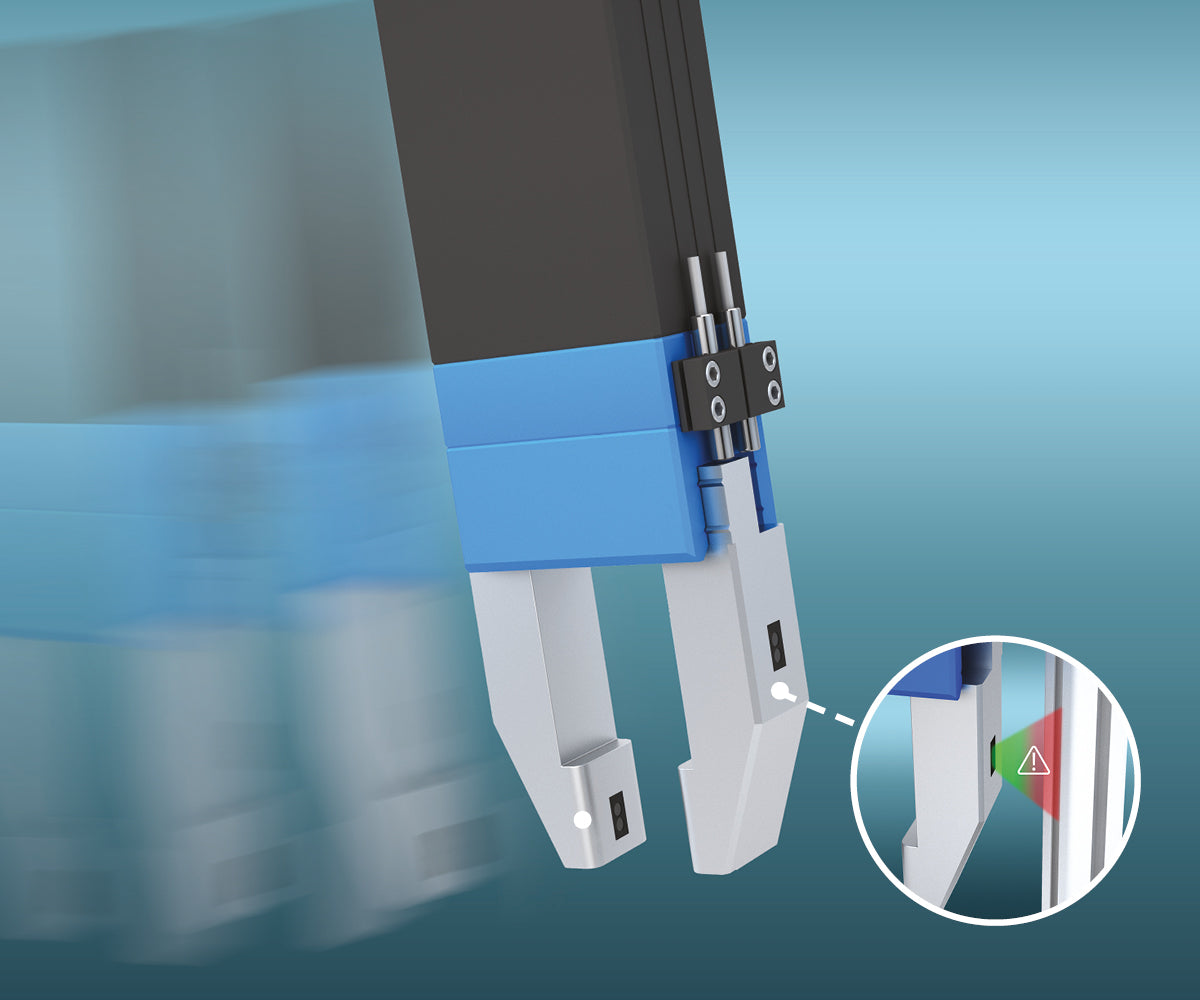
During automated production of electronic equipment, compact multi-finger robot grippers transport parts between operations. In the event of a malfunction or an unplanned human intervention, there’s an unacceptable collision hazard; designers insist on an overriding anti-collision system. Miniature distance sensors, embedded in the outward-facing surfaces of the gripper jaws, monitor the position of potential obstructions during travel, preventing accidents
Customer Values
- Embedded miniature distance sensors ensure reliable detection of potential obstructions, eliminating collision hazards
- Compact 4mm x 4mm x 11m sensor envelope with no external housing allows easy integration in tight spaces
- Sensing distances of up to 40mm offer designers highly versatile options when specifying equipment
- Industry-standard PNP analog output with a range of 0.3V to 3V allows scope for in-situ adjustment
- Proven technology ensures fit-and-forget operation with no manual intervention
- Non-contact solution maintains production throughput and avoids accidents
Specific Product Advantages
- Miniature, housing-free photoelectric distance sensors suitable for easy integration
- 0.3V to 3V analog output with PNP interface and minimal power consumption
- Sensor weight only 3.1 grams with a compact 4mm x 4mm x 11m envelope
- Industry-standard -25°C to +65°C operating range
- Reliable, compact vibration-resistant sensors
Customer Application
Collision avoidance is an absolute priority for automation engineers implementing robotic handling systems. At worst, a collision can result in a fatality; at best, damage to static infrastructure or other equipment. Either way, the implications are serious –for any organization, an accident is costly and potentially tragic. While anti-collision measures will typically be coded into software routines, this isn’t always enough.
In a manufacturing cell, robotic handling systems build electromechanical sub-assemblies before presenting them for automated testing. At each stage, parts are transported between operations by compact, multi-finger robot grippers, which are programmed individually according to the geometry of both the parts and the production equipment.
As the products develop over time, the routines that control their manufacture also evolve. If conflicts between neighboring robots aren’t eliminated completely, or if unplanned human intervention occurs, there’s an unacceptable risk of an accident. A cost-effective hardware solution is required to provide overriding anti-collision protection if this situation arises.
Customer Solution
Production engineers specified grippers fitted with Contrinex MiniDist Brut photoelectric sensors as a reliable and cost-effective means of measuring the proximity of obstructions in real time. When transporting parts between operations, these miniature distance sensors, embedded in the outward-facing surfaces of the gripper jaws, monitor the position of potential obstructions during travel.
MiniDist Brut sensors are designed with the needs of OEMs and system integrators in mind and provide an unobtrusive fit-and-forget solution. These miniature devices weigh only 3.1 grams, and with a compact 4mm x 4mm x 11m envelope and no external housing, they allow easy integration in tight spaces with insufficient room for traditional devices.
With sensing distances of up to 40mm, MiniDist devices offer designers highly versatile options when specifying equipment. An industry-standard PNP analog output ensures optimum flexibility, with an output range of 0.3V to 3V allowing scope for in-situ adjustment. Connection is via a 4-wire PVC-sheathed cable with a 2-meter standard length; alternative options are available on request.
These highly versatile miniature sensors meet the customer’s need for reliable operation while preventing accidents. The solution is both highly reliable and cost-effective while eliminating collision hazards; production throughput is maintained at or above target levels without compromising the safety of people or equipment.